应williamhill英国邀请,近日,英国斯旺西大学williamhill英国国际航运和贸易法研究中心主任Baris Soyer教授为我院师生举行在线学术讲座。讲座的主题是:英国有关智能船法律问题的最新研究进展。讲座由williamhill英国副教授、国际联合学院院长张金蕾博士主持,williamhill英国王欣副教授担任与谈人,williamhill英国夏元军副教授、于诗卉老师等百余名师生在线参加了讲座。
讲座中,Baris Soyer教授介绍了英国斯旺西大学国际航运和贸易法研究中心团队为英国海事和海岸警卫队(Maritime Coastguard Agency - MCA)新近完成的一项和智能船有关的法律研究。该研究旨在帮助MCA梳理英国现行的国内法在智能船问题上面临的挑战,以期在国内法层面为智能船时代的到来做好应对。
该研究围绕着一艘假想的智能船MV Albion可能涉及的法律问题展开,设定了由英国船东所有、在英国登记、仅从事沿海运输、由位于斯旺西的远程控制中心(Remote Control Centre - RCC)操控又同时具备IMO定义的第四级智能程度、船东与RCC之间的合同约定争议解决适用英国法并由英国法院管辖等前提条件。这艘智能船的出现,从英国国内的船舶监管的角度来看,给海事管理部门(例如:MCA)、港务管理部门(port and harbour authorities)以及相关立法机构(例如:英国的议会及其他享有立法权的机构)都带来了挑战。
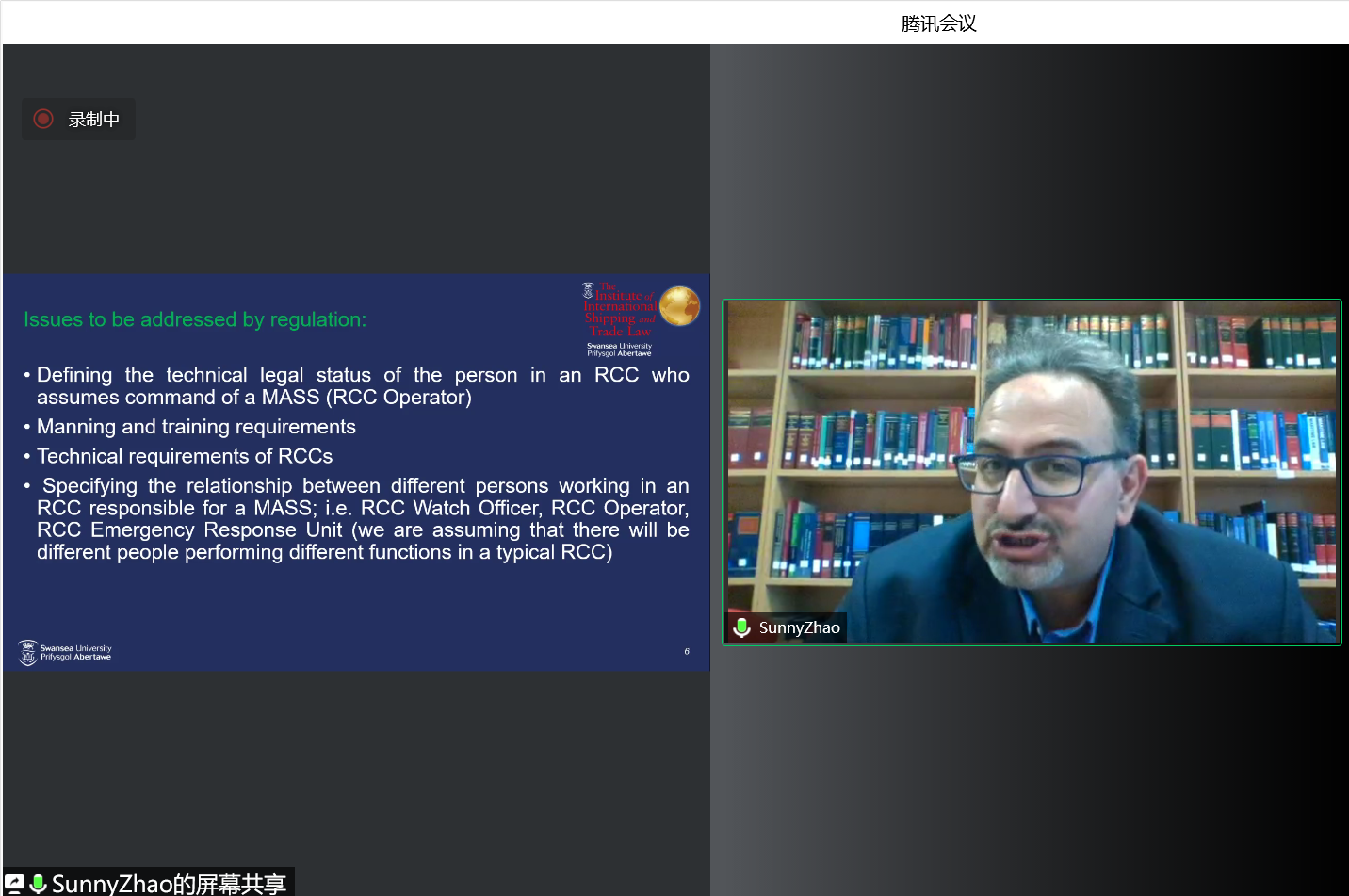
MCA是在英国水域内负责船舶发证、航行安全和船舶管理的海事管理机构。对于MCA以及类似的海事管理机构来说,对智能船实施安全监管所面临的挑战主要集中在对RCC的监管以及对船舶设计和建造的监管两个方面。在RCC方面,需要考虑在相关的法律法规中明确RCC操控人员的法律地位、RCC的人员配备标准和培训标准、RCC应满足的技术要求、RCC不同操控人员之间的功能划分(例如:谁负责瞭望、谁负责操控、谁负责应急反应)等问题。在船舶的设计和建造方面,相关的法律法规需要明确船舶应当达到的技术标准。
港务管理部门有权决定进出港口的船舶应具备的条件。如果某一港口的管理规则要求进港船舶必须配备船员,则意味着智能船将无法停靠该港口。因此,有必要重新审视那些可能与智能船冲突的管理规则。例如,1990年《亨伯河航行条例》第8条和第11条第1款就规定了在亨伯河港区范围内有自航能力的船舶,无论吨位大小,在航行中必须在驾驶台配备一名适任的驾驶员,船上必须配备至少两名人员否则不得开航。此外,港口管理规则中会经常提到船长的职责。1847年《港口、码头、岸堤条款法》第三条以及其他相似的法规中将船长定义为“在当时指挥控制船舶的人”。RCC的操作人员,是否满足这类法规对于船长的定义,是需要思考的问题。
对于港务管理部门来说,和引航有关的法规能否适用于对智能船实施的远程引航,也是需要明确的问题。1987年《引航法》规定“相关港口管理部门”(competent harbour authorities - CHA)有权制定在其管辖的港区以及其他区域范围内适用的航行安全管理规范。该法第31条第1款规定“引航员”是指“不属于船舶、却可以指挥船舶的人”。现有的引航法规可以适用于远程引航,但需要进一步明确:远程引航员的培训和操作规程;操控智能船的计算机系统应具备能够切换到远程引航员操控的模式,监管方需要就此问题与智能船的生产商密切合作,以确保系统的兼容性;远程控制中心操控人员和远程引航员之间的法律关系,包括:远程操控人员是否具备船长的法律地位?如果远程引航员出现不适任的情况,远程操控人员的控制权能否优先于引航员?相关港口管理部门能否豁免智能船的强制引航?满足什么样的条件可以向远程操控人员签发引航豁免证书?
对于立法机构来说,现有的法律在船舶碰撞、海事赔偿责任限制、海难救助三个方面都需要及时更新。
在船舶碰撞责任方面,传统的碰撞责任以过错责任原则为归责原则,过错主要是船上人员的过错,或者是船东在行政管理方面的过错(例如:船舶给养不足、船员培训不足)。过错责任原则的适用有两种例外情况:一是根据1874年的《港口、码头和岸堤条款法》第74条,船舶碰撞给港口设施造成损害的赔偿责任;二是基于产品责任侵权,船舶碰撞给船员或者他人造成人身损害的赔偿责任。
过错责任原则将继续适用于智能船,但现有的法律需要作出调整。首先,远程操控人员应作为船舶所有人的受雇人,远程操控人员的过错应视为船舶所有人的过错,由船舶所有人对远程操控人员的过错引起的船舶碰撞责任。根据现有的1995年《商船航运法》,远程操控人员的法律地位是独立合同人而非船东的受雇人,船东根据现有的立法对远程操控人员的过错引起的船舶碰撞不承担责任的结论,是需要修正的。其次,有关防止船舶碰撞的规则要求船上人员保持适当了望的义务,与之类似的规定也需要更新。再次,如果碰撞是由于智能船所使用的设备或者程序缺陷引起的,将产生产品责任的问题。但是,如果该产品不是在英国制造的,英国法对于该产品责任的适用将受到限制。并且,1987年《消费者保护法》所确立的严格责任原则仅适用于产品缺陷所带来的人身伤亡损害赔偿责任。显然,现有的关于产品责任的立法并不能给智能船碰撞的受害方提供充分的保护。
在责任限制方面,RCC以及在RCC工作的操控人员能否享受海事赔偿责任限制的权利?为智能船提供产品制造、软件设计和程序设计服务的人员能否享受海事赔偿责任限制的权利?这些都是立法需要明确的问题。
在海难救助方面,纳入到1995年《商船航运法》中的1989年《救助公约》的规定,可以适用于智能船,但是有两个方面的问题需要进一步明确。第一个问题是,应当由谁来承担海难救助中的“船长”一职的职责?在海难救助作业中船长享有签订救助合同的权利、尽力施救的义务以及禁止救助的权利。建议对现有的立法进行修订以明确,对于无人船或者处于远程控制下的船舶来说,“船长”是指在相关控制基站对船舶进行实时控制的人。第二个问题是,IT人员在岸上实施的、编写代码解除智能船的系统故障或者将智能船从网络黑客的控制下解救出来的行为,是否满足《救助公约》所要求的救助作业必须发生在可航水域这一条件?建议对1995年《商船航运法》进行修订,将完全在岸上实施的救助行为也纳入海难救助的范围。
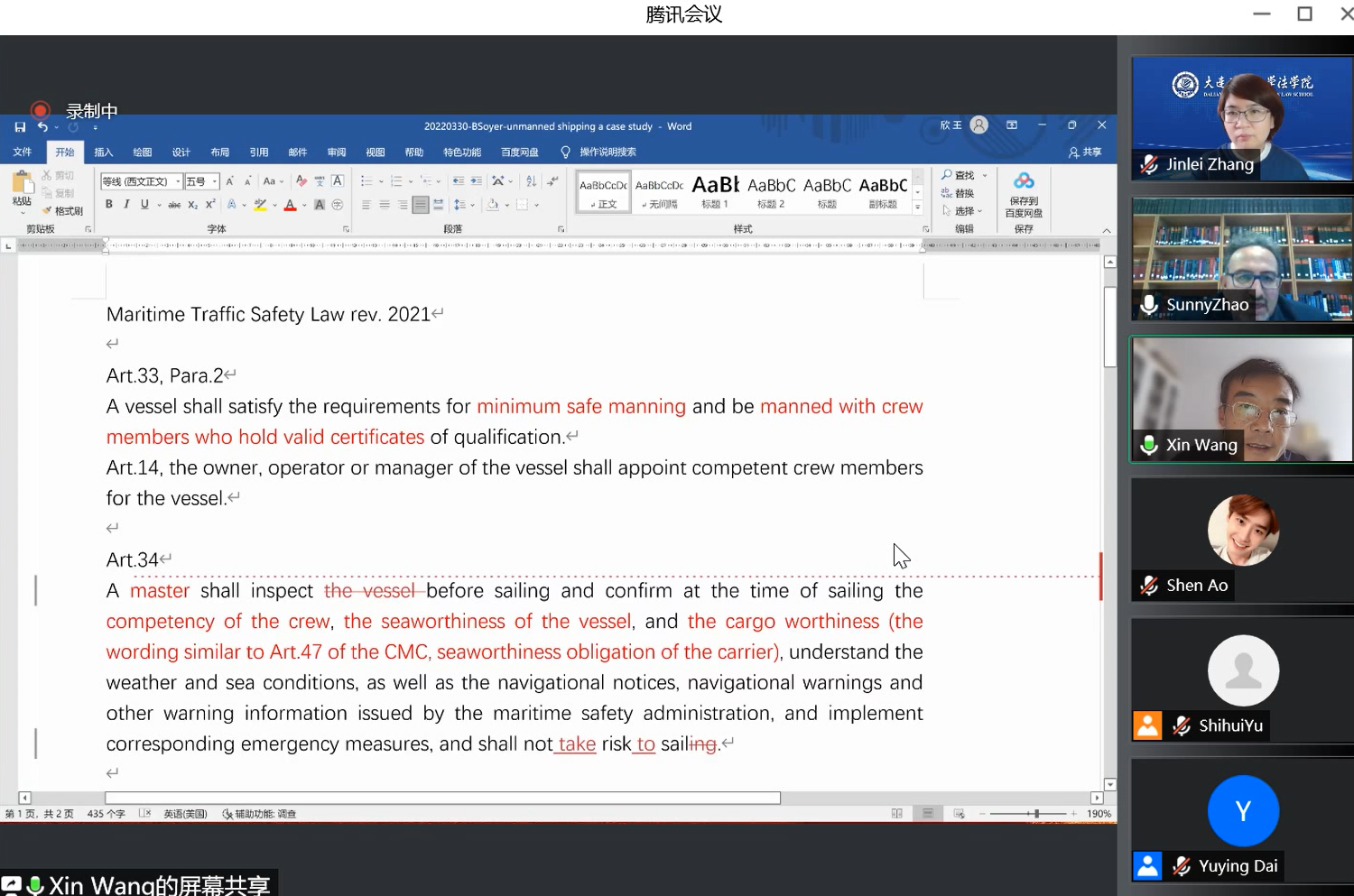
王欣副教授在与谈环节以我国法为视角逐一分析了Baris Soyer教授在讲座中提到的智能船所带来的各种挑战,并结合我国《海商法》、《海上交通安全法》等法律的相关条文指出了智能船在我国所面临的问题并提出了自己的思考。
讲座内容丰富,干货满满,深入浅出,参会的老师和同学都感到收获颇丰。本次讲座使参会人员了解了英国法下智能船法律问题研究的最新成果,同时也为接下来的教学、科研活动的开展提供了新的思路。
